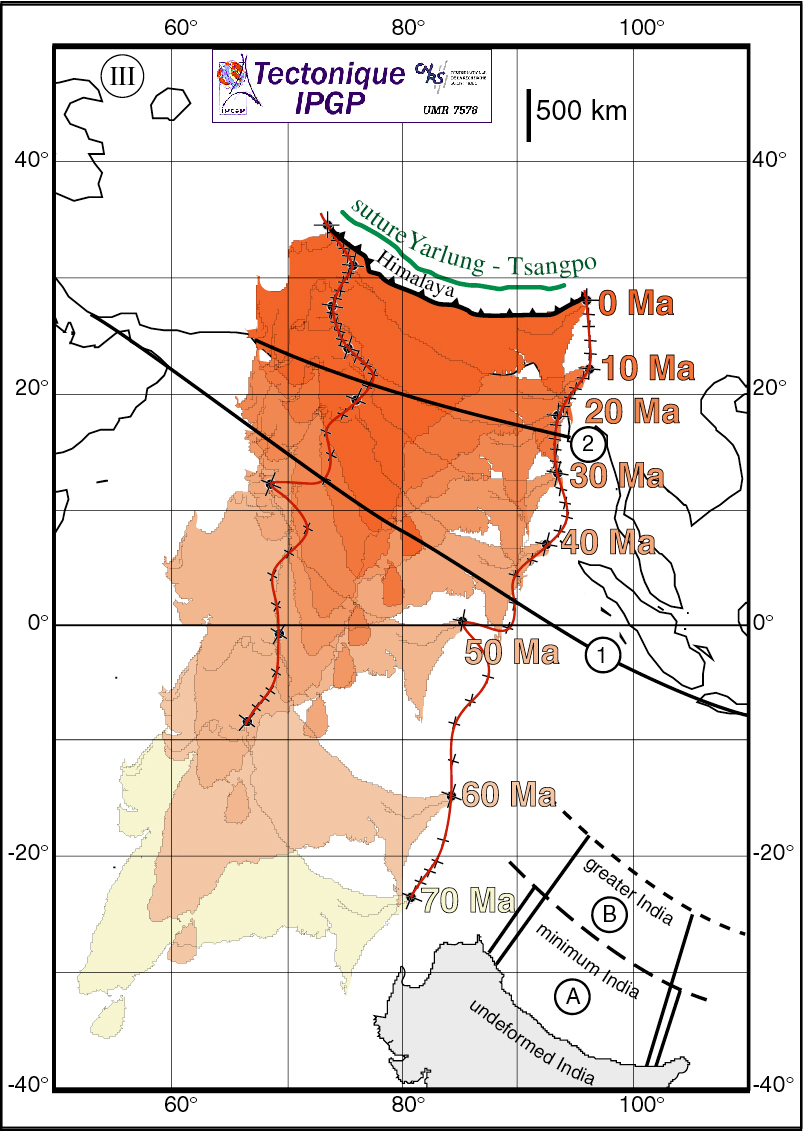
Cinématique relative Inde-Eurasie entre 70Ma et l'actuel.
L'Eurasie est considérée fixe et les positions de l'Inde (la marge nord Indienne correspond au MBT) représentées tous les 10 Ma. La position de deux points aujourd'hui situés aux deux syntaxes est représentée tous les 2 Ma (croix). Plusieurs hypothèses sur la forme de la marge sud eurasiatique avant la collision (1: Tapponnier et al., 1986; 2: Le Pichon. et al, 1992) ainsi que sur la quantité à rajouter à la position de la marge nord Indienne (A: minimum; B: greater India) sont également représentées. Projection rectilinéaire centrée en 0°N, 80°E.
Figure3 India/Eurasia kinematics
India-Eurasia kinematics since 70Ma.
Eurasia is fixed and India positions represented every 10 Ma (India northern magin is drawn along the MBT). Positions of two points now located at the western and easten Himalayan syntaxes are drawn each 2 Ma (crosses). Various hypothesis on Eurasia southern margin configuration are drawn (1: Tapponnier at al. 1986; 2: LePichon et al., 1992), as well as possible extent of the northern Indian margin (A: minimum; B greater India). Rectilinear projection centered on 0°N, 80°E.